Manuals/A-MCA

Disclaimer
Zaber’s products are not intended for use in any critical medical, aviation, or military applications or situations where a product's use or failure could cause personal injury, death, or damage to property. Zaber disclaims any warranty of fitness for a particular purpose. The user of this product agrees to Zaber's general terms and conditions of sale.
Conventions used throughout this document
- Fixed width type indicates communication to and from a device. The ↵ symbol indicates a carriage return, which can be achieved by pressing enter when using a terminal program.
- An ASCII command followed by (T:xx) indicates a legacy T-Series Binary Protocol command that achieves the same result. Not all ASCII commands have an equivalent legacy counterpart. e.g.:
- move abs 10000 (T:20:10000) shows that a move abs ASCII command can also be achieved with binary command number 20.
- All devices support the Binary Protocol, however the ASCII Protocol is only supported in devices with firmware version (T:51) 6.06 and above.
Precautions
The A-MCA series of stepper motor controllers are intended to drive a wide variety of motors. It is not possible to choose factory default settings that will work with every motor that may be connected. Therefore, you will need to change some of the settings from the default values to match the motor you are driving. For a Zaber peripheral device, a complete setup can be accomplished by configuring the peripheralid (T:66) setting with the peripheral's ID number. See the detailed usage examples for more information on how to modify the settings, particularly for non-Zaber peripherals. Damage to the actuator may result if the recommended settings are set improperly.
WARNING: Serious damage can occur to stepper motor products when operated with significantly higher-than-rated current. The A-MCA controller can provide up to 2A of current to a peripheral. BEFORE CONNECTING A NEW DEVICE to the A-MCA controller, it is important to set the correct motor parameters in the controller. Please check the rated current for any peripheral device before changing the current settings on the A-MCA from the default values. To put the A-MCA controller into safe-mode (low current) settings, configure the peripheralid (T:66) setting to 0. If you have any questions, please contact Zaber Technical Support
Device Overview
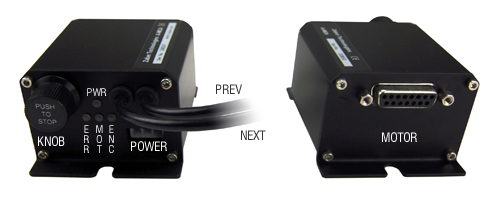
Connectors
Power

|
Pin | Description |
|---|---|---|
| 1 | 12 - 48V | |
| 2 | GND | |
| 3 | Chassis |
RS232 Communications

|
Pin | Previous | Next |
|---|---|---|---|
| 1 | - | - | |
| 2 | Transmit | Receive | |
| 3 | Ground | Ground | |
| 4 | - | - | |
| 5 | - | - | |
| 6 | Receive | Transmit |
- Default Settings
- Baud Rate: 9600
- Protocol: Binary
- Specifications
- Supported Protocols: Zaber ASCII, Zaber Binary
- Supported Baudrates: 9600, 19200, 38400, 57600, 115200
- Bits: 8
- Parity: None
- Stop Bits: 1
- Flow Control: None
Motor Interface
 Female D-Sub15 Connector |
Pin | Description |
|---|---|---|
| 1 | +5 V | |
| 2 | N.C. | |
| 3 | N.C. | |
| 4 | N.C. | |
| 5 | Home Limit Sensor | |
| 6 | Ground | |
| 7 | Motor B1 | |
| 8 | Motor A1 | |
| 9 | AutoDetect Clock | |
| 10 | Encoder A | |
| 11 | Encoder B | |
| 12 | Encoder Index | |
| 13 | Ground | |
| 14 | Motor B2 | |
| 15 | Motor A2 |
NOTE: The limit sensor inputs are pulled up to the internal supply rail and are designed to be pulled low by an open collector.
NOTE: All encoder inputs are non-isolated 5 V TTL lines.
Indicators

- PWR (Green) - Power.
- On: Controller is operational.
- Blinking at 2Hz: The power supply voltage or device temperature is out of range.
- Fading in and out slowly: The device is parked. See the tools parking (T:65) command.
- ERR (Red) - Error.
- On/blinking: Controller has lost its settings, or an error has occurred. Please contact Zaber Technical Support.
- MOT (Yellow) - Communication/Busy.
- On: Device is moving, or data is being transferred.
- Blinking: Device is under manual control via the knob (in Velocity mode). The blinking rate is proportional to movement speed.
- Blinking at fixed rate: Packet corruption has occurred for ASCII commands sent with a checksum.
- ENC (Blue) - Slip/Stall.
- On: The device is slipping.
- On-Off cycle every 2 sec: The device has stalled and stopped.
- Flashes: The stationary device has been forced out of position (2 short flashes every 1 sec), or the encoder has encountered a read error and raised the FQ warning flag (5 short flashes every 2 sec).
Installation
The A-MCA can be connected to a computer as follows:
- Either plug the Mini-DIN to D-Sub serial adaptor (T-DSUB9) into your computer’s serial port, or the Mini-DIN to USB adapter (T-USBDC) into one of your computer's USB ports, then plug the device’s data cable into the adaptor. For the USB adaptor, new computers will often be able to install the necessary drivers automatically when the cable is plugged in for the first time. If the computer reports that the driver installation was unsuccessful, you can download the drivers for Windows, Mac, or Linux here. Installation instructions and troubleshooting information are available for each operation system here. You may need to use a cable extension to reach your computer. There is no need to power-down or reboot the computer.
- Connect the power plug of your power supply to the power connector of the unit. The green LED should light up indicating the unit has power.
- Additional devices can simply be daisy-chained to the first. See Daisy-Chaining Devices below.
- Install software from the Software page. For the initial setup, it is recommended that Zaber Console is used.

As a simple first test, try entering these instructions:
The parameter of 10000 in the move command above specifies 10000 microsteps. To see the microstep size (default resolution) for the peripheral and how it translates to displacement, first go to the product overview page, find your device, click through to the device's webpage, and click on the "Series Specs" tab. The microstep size (default resolution) will be shown in the list of product specs either in the "Group Specifications" section or the "Comparison" section.
Daisy-Chaining Devices
Multiple devices can be connected together in a chain through the Prev and Next or USB and Next connectors. This allows any number of devices to be controlled from a single connection to a computer, reducing cabling demands. A power supply needs to be connected to each device in the chain. Whenever a device is added or removed from a chain, a renumber (T:2) command should be sent to prevent device-address conflicts.

Zaber recommends having two separate chains when the connector types differ. To daisy-chain devices with different connectors, the following steps should be followed:
- DSUB9 and MiniDin 6 with firmware version at or below 6.05: (Binary Protocol Chain)
- The DSUB9 devices' comm.protocol (T:123) should be set to 1 (Binary) and the comm.rs232.baud (T:122) set to 9600.
- The DSUB9 devices should be chained together closest to the computer
- A T-DSUB9 connector can be used to connect the two strings of devices together.
- DSUB9 and MiniDin 6 with firmware version at or above 6.06: (ASCII Protocol Chain)
- The Minidin6 devices' comm.protocol (T:123) should be set to 2 (ASCII) and the comm.rs232.baud (T:122) set to 115200.
- The DSUB9 devices should be chained together closest to the computer
- A T-DSUB9 connector can be used to connect the two strings of devices together.
For assistance please contact Zaber Technical Support
Grounding
To prevent damage to the device due to static buildup, the device should be properly grounded.
Failure to ground the unit may result in the unit shutting down unexpectedly or ceasing to communicate with the computer. This problem can be minimized by not touching the unit during operation. If the unit fails due to static discharge, unplugging it and plugging it back in or sending a system restore (T:36) command will usually fix the problem.
Most Zaber devices are grounded via the shield wire of the data cables. This should normally provide a path to ground via the computer. For units which are being used without a computer, a ground lead should be connected to the chassis pin of the power supply connector.
Note: Encoder-embedded devices are sensitive to electrically noisy environments. Static discharges can affect position calibration and cause unstable behaviour. If the device is behaving strangely, verify that the device is properly grounded, reset the device (either by the system reset (T:0) command or by disconnecting then reconnecting power), then re-initialize the device with the home (T:1) command.
Quick Tutorial
The following tutorial uses Zaber Console to communicate with the device(s). Please refer to the ASCII Protocol Manual and/or Binary Protocol Manual for detailed information on the available commands and how to setup and use other software.
Initial Setup
The following steps need to be performed whenever a new unit is being installed.
NOTE: Ensure no motors are connected to the controller before applying power for the first time. Powering up the controller with a peripheral connected before it has been properly configured can result in damage to the peripheral and controller.
- Power up all integrated devices and controllers in the chain. The power indicator on each should light up.
- Download and install Zaber Console. Start Zaber Console and select the communications port the first controller is connected to. For instructions on how to find the available communication ports on your system, please refer to: Appendix A - Available Communications Ports
- From the Console, issue a renumber (T:2) command to all devices. The first device closest to the computer in the chain will become device 1; the next, device 2 and so on.
- On the new unit, configure the peripheralid setting of each axis with either the ASCII set peripheralid command or the Binary T:66 command. The Peripheral Id for Zaber devices can be found on its identification label. Alternatively a full list of Peripheral Ids can be found at: Zaber Peripheral IDs. This step needs to be performed whenever a motorized peripheral is changed for a different type. If a 3rd party peripheral is being driven, please contact Zaber Technical Support for assistance.
- Connect the motorized peripherals.

Initialization
Every time the controller is powered up or reset, the motorized peripheral(s) need to be returned to the home position before they can be used. This is achieved by sending the home (T:1) command to the individual unit or all units. Attempting to move the peripheral before it has been homed will result in an error, as shown below:
/01 move rel 10000↵ @01 0 RJ IDLE WR BADDATA
If the device is being used under manual control, the motorized peripherals need to be driven to the minimum (home) position before they will operate over their full range.
Using the Device
Several commonly used ASCII commands, and their Binary equivalents, are shown below. For a full list of the available commands, please refer to the Command Reference section below.
| Command | Description |
|---|---|
| /1 1 get pos↵ (T:60) | Query the current position of device #1 axis #1. |
| /1 1 move abs 10000↵ (T:20:10000) | Move device #1 axis #1 to position 10000 microsteps. |
| /2 1 move rel -12800↵ (T:21:-12800) | Move device #2 axis #1 in the negative direction by 12800 microsteps. |
| /1 stop↵ (T:23) | Decelerate and stop ALL axes on device 1. An axis number of 0 or no no axis number implies all axes on the devices, or the device itself. |
| /move vel 153600↵ (T:22:153600) | Move ALL devices and ALL axes in the positive direction at the speed 153600. A device address of 0 or no device address implies all devices in the chain. |
Modifying Device Settings
Here are some examples if you would like to customize particular device settings. Refer to the ASCII Settings or Command Reference section for detailed descriptions of each setting.
| Command | Description |
|---|---|
| /1 set maxspeed 100000↵ (T:42:100000) | Set the speed of the all axes on the device. |
| /1 get maxspeed↵ (T:53:42) | Query the axes' speed. |
| /1 system restore↵ (T:36) | Restore all the settings of device 1 to the default. |
Built-In Help
Zaber A-Series devices (with ASCII support) feature a built-in help guide, providing a quick and easy reference for all Commands and Settings that the device has. To access the help, send: /1 help↵
The device will respond with a detailed description on how to access specific information about commands and replies, as shown below:
@01 0 OK IDLE WR 0 #01 0 COMMAND USAGE: #01 0 '/stop' stop all devices #01 0 '/1 stop' stop device number 1 #01 0 '/1 2 stop' stop device number 1 axis number 2 #01 0 #01 0 Type '/help commands' for a list of all top-level commands. #01 0 Type '/help reply' for a quick reference on reply messages. #01 0 Visit www.zaber.com/support for complete instruction manuals.
To access help for a specific command, for example the move command, send:
/1 help move↵
@01 0 OK IDLE -- 0
#01 0 move abs {x} Move to absolute position
#01 0 move rel {x} Move by relative position
#01 0 move vel {x} Move at constant velocity
#01 0 move min Move to minimum position
#01 0 move max Move to maximum position
Manual Control
The A-Series range of motion control products are integrated with a depressible knob with 20 detents per revolution, allowing devices to be controlled without the use of a computer. There are two manual movement modes available, Velocity and Displacement: switch between these modes by holding down the knob for 1 second or via configuring the knob.mode (T:109) setting.
Upon power-up, the device will only travel towards the motor from its start-up position until the home position is reached. Once the device has been manually homed, the full range of travel becomes available.
Velocity Mode
Turn the knob clockwise to move the device in the positive direction (extend) or counter-clockwise for negative direction (retract). Each detent of the knob increases the speed of the carriage.
There are 16 speeds in each direction. The velocity profile and maximum speed can be configured via the knob.speedprofile (T:112) and knob.maxspeed (T:111) settings. The device stops and resets the knob upon arriving at the end of travel.
Displacement Mode
Turn the knob clockwise to move the device in the positive direction (extend), counter-clockwise for negative direction (retract). Each detent of the knob moves the device a fixed number of microsteps, specified by the knob.distance (T:110) setting. The device moves at the speed specified by the maxspeed (T:42) setting, or the slower of speed and limit.approach.maxspeed (T:41) if the device has not been homed. If there are fewer than knob.distance (T:110) microsteps to the end of travel and another move is requested, the device will move to the end of travel and then stop.
Summary of knob functionality
- Turning the knob:
- Moves the device in the direction of knob turn.
- Pressing the knob:
- Decelerates and stops the device (identical to a Stop command).
- Instantly stops the device, if the device is already decelerating.
- Pressing and holding the knob for 1 sec:
- Toggles between Velocity Mode and Displacement Mode.
Trajectory Control and Behaviour
This section describes the behaviour of the device trajectory when a movement command is issued.
Software Position Limits
The travel range of the device is confined by the Minimum Position and Maximum Position settings. The factory settings for the devices are configured to match the physical travel range. If a customized range is desired, it can be changed via configuring the limit.min (T:106) and limit.max (T:44) settings to appropriate values.
- Minimum Position
- When Current Position is less than the Minimum Position value, the device cannot move in the negative direction (towards the motor).
- Maximum Position
- When Current Position is greater than the Maximum Position value, the device cannot move in the positive direction (away from the motor).
Movement Speed
The movement speed of the device depends on device status and various speed settings. If the device has not been initialized by the home (T:1) command or by moving towards the home end of the device, movement speed will be constrained to fail-safe values. The home status of the device can be determined by reading the limit.sensor.triggered (T:53) setting for the home sensor. The binary command additionally requires a value of 103.
Movement speed of the device is specified below:
- Knob manual movement in Velocity Mode
- The device will move at the specified speed regardless of home status.
- The speed is specified by the knob.speedprofile (T:112) and knob.maxspeed (T:111) settings.
- Other movement commands - When device has not been homed
- The device will move at the slower of the maxspeed (T:42) and limit.approach.maxspeed (T:41) settings.
- Other movement commands - When device has been homed
- The device will move at the speed specified by the maxspeed (T:42) setting.
Quick Command Reference
A-Series devices ship with either the ASCII or Binary protocol enabled by default. Please refer to the RS232 Communications section above to see the default protocol for the A-MCA.
ASCII Protocol
The following table offers a quick command and setting reference for the A-MCA. Follow the links to view a detailed description of each instruction or refer to the ASCII Protocol Manual.
Quick Commands
Parameters in square brackets, e.g. [clr], indicate that the parameter is optional.
Parameters in italics, e.g. value, indicate that data, typically a number, needs to be provided.
Parameters separated by a pipe, e.g. abs|rel, indicate that one of the parameters in the set need to be provided.
| Command | Scope | Parameter(s) | Returns | Firmware Versions | Description |
|---|---|---|---|---|---|
| calibration | Device | Refer to the documentation | 0 | 6.24+ | Configure linear encoder calibration. |
| estop | Axis | 0 | 6.06+ | Instantly stops motorized movement. | |
| get | Device and Axis | setting | value | 6.06+ | Retrieves the current value of the device or axis setting. |
| help | Device | commands reply warnflags enums command ... enum |
0 | 6.06+ | Displays the help information for the system. |
| home | Axis | 0 | 6.06+ | Moves the axis to the home position. | |
| move | Axis |
abs|rel|vel value |
0 | 6.06+ | Moves the axis to various positions along its travel. |
| renumber | Device | value | 0 | 6.06+ | Renumbers all devices in the chain. |
| set | Device and Axis | setting value | 0 | 6.06+ | Sets the device or axis setting setting to the value. |
| stop | Axis | 0 | 6.06+ | Decelerates the axis and brings it to a halt. | |
| stream | Device | Refer to the documentation | Refer to the documentation | 6.12+ | Performs an action related to streamed, interpolated motion. |
| system reset | Device | 0 | 6.06+ | Resets the device, as it would appear after power up. | |
| system restore | Device | 0 | 6.06+ | Restores common device settings to their default values. | |
| tools echo | Device | (message) |
0 | 6.06+ | Echoes the provided message (if any) back to the user. |
| tools findrange | Axis | 0 | 6.10+ | Uses the home and away sensors to set the valid range of the axis. | |
| tools gotolimit | Axis | limit dir action update | 0 | 6.06+ | Moves the axis to a limit sensor and performs the provided actions. |
| tools parking | Device |
state|park|unpark |
0|1 |
6.06+ | Parking allows the device to be turned off and used at a later time without first having to home. |
| tools setcomm | Device | rs232baud protocol | 0 | 6.06+ | Sets RS232 baud rate and communication protocol for RS232 and USB. |
| tools storepos | Axis |
number [position|current] |
0|position |
6.06+ | Stores a number of positions for easy movement. |
| trigger | Device | Refer to the documentation | 0 | 6.06+ | Configures actions to be performed on the device when a certain condition is met. |
| warnings | Axis | [clear] |
0 | 6.06+ | Displays the active device and axis warnings, optionally clearing them if applicable. |
Quick Device Settings
The settings listed below can be inspected and modified with the get and set commands described above.
| Setting | Scope | Writable | Firmware Versions | Description |
|---|---|---|---|---|
| accel | Axis | Yes | 6.06+ | Sets the acceleration used to modify the speed. |
| calibration.type | Axis | No | 6.24+ | The type of calibration saved for the axis. |
| cloop.counts | Axis | Yes | 6.06+ | The number of counts generated by the encoder for one full revolution. |
| cloop.displace.tolerance | Axis | Yes | 6.19+ | The minimum deviation in the position of a stationary axis that will register as a displacement. |
| cloop.duration.max | Axis | Yes | 6.17+ | The duration for attempting fine position correction. |
| cloop.mode | Axis | Yes | 6.06+ | The closed-loop (slip, stall, and displacement detection and recovery) control mode. |
| cloop.stalltimeout | Axis | Yes | 6.06+ | The amount of time to wait after a stall/displacement condition, in milliseconds. |
| cloop.steps | Axis | Yes | 6.06+ | The number of full steps required for the motor to complete one revolution. |
| comm.address | Device | Yes | 6.06+ | The device address. |
| comm.alert | Device | Yes | 6.06+ | The device will send alert messages when this setting is 1. |
| comm.checksum | Device | Yes | 6.06+ | The device includes checksums in its messages if this setting is set to 1. |
| comm.protocol | Device | Yes | 6.06+ | The communications protocol used by the device on the current interface. |
| comm.rs232.baud | Device | Yes | 6.06+ | The baud rate used by RS232 Prev and Next interfaces. |
| comm.rs232.protocol | Device | Yes | 6.09+ | The protocol used by RS232 Prev and Next interfaces. |
| deviceid | Device | No | 6.06+ | The device ID for the unit. |
| driver.current.hold | Axis | Yes | 6.06+ | Current used to hold the motor in position, in 20 mA DC increments. |
| driver.current.max | Axis | No | 6.16+ | Maximum legal value of driver.current.hold and driver.current.run. |
| driver.current.run | Axis | Yes | 6.06+ | Current used to drive the motor, in 14.1 mA RMS (20 mA peak) increments. |
| driver.dir | Axis | Yes | 6.06+ | Reverse the motor driver output direction. |
| encoder.count | Axis | Yes | 6.06+ | The recorded counts of the axis encoder. |
| encoder.count.calibrated | Axis | No | 6.24+ | The calibrated counts of the axis encoder. |
| encoder.dir | Axis | Yes | 6.06+ | Inverts the counting direction for the axis encoder. |
| encoder.error | Axis | No | 6.17+ | Position error measured by encoder. |
| encoder.filter | Axis | Yes | 6.06+ | Enable and set up digital filtering of the encoder inputs. |
| encoder.index.count | Axis | Yes | 6.06+ | The recorded counts of the axis encoder index pulse. |
| encoder.index.mode | Axis | Yes | 6.06+ | The operating mode of the axis encoder index signal. |
| encoder.index.phase | Axis | Yes | 6.06+ | The required phase for an index pulse to be counted. |
| encoder.mode | Axis | Yes | 6.06+ | The operating mode of the axis encoder. |
| encoder.pos | Axis | No | 6.17+ | Position measured by encoder. |
| knob.dir | Axis | Yes | 6.06+ | Sets the movement direction for the knob. |
| knob.distance | Axis | Yes | 6.06+ | Sets how far the device moves with each step of the knob in displacement mode, in units of microsteps. |
| knob.enable | Axis | Yes | 6.06+ | Disable the use of the knob when set to 0. |
| knob.maxspeed | Axis | Yes | 6.06+ | The maximum speed that can be reached using the knob in velocity mode. |
| knob.mode | Axis | Yes | 6.06+ | Sets the mode of the manual control knob. |
| knob.speedprofile | Axis | Yes | 6.06+ | Sets the profile to be used per increment when in velocity mode. |
| limit.approach.maxspeed | Axis | Yes | 6.06+ | Maximum speed used when approaching a limit sensor. |
| limit.cycle.dist | Axis | Yes | 6.20+ | The length of one full rotation. |
| limit.detect.decelonly | Axis | Yes | 6.06+ | Deceleration used when stopping after a limit sensor has triggered. |
| limit.detect.maxspeed | Axis | Yes | 6.06+ | Maximum speed used when moving away from a limit sensor. |
| limit.home.action | Axis | Yes | 6.06+ | Automatic limit switch action. |
| limit.home.edge | Axis | Yes | 6.06+ | Sensor edge to align action to. |
| limit.home.pos | Axis | Yes | 6.06+ | The updated position of the sensor, when triggered. |
| limit.home.posupdate | Axis | Yes | 6.06+ | Position update to occur when sensor is triggered. |
| limit.home.preset | Axis | Yes | 6.06+ | The default position of the home sensor. |
| limit.home.state | Axis | No | 6.06+ | The state of the home sensor. |
| limit.home.triggered | Axis | No | 6.06+ | Whether the home sensor has been triggered previously. |
| limit.home.type | Axis | Yes | 6.06+ | The type of home sensor connected. |
| limit.away.action | Axis | Yes | 6.06+ | Automatic limit switch action. |
| limit.away.edge | Axis | Yes | 6.06+ | Sensor edge to align action to. |
| limit.away.pos | Axis | Yes | 6.06+ | The updated position of the sensor, when triggered. |
| limit.away.posupdate | Axis | Yes | 6.06+ | Position update to occur when sensor is triggered. |
| limit.away.preset | Axis | Yes | 6.06+ | The default position of the away sensor. |
| limit.away.state | Axis | No | 6.06+ | The state of the home sensor. |
| limit.away.triggered | Axis | No | 6.06+ | Whether the away sensor has been triggered previously. |
| limit.away.type | Axis | Yes | 6.06+ | The type of away sensor connected. |
| limit.max | Axis | Yes | 6.06+ | The maximum position the device can move to, measured in microsteps. |
| limit.min | Axis | Yes | 6.06+ | The minimum position the device can move to, measured in microsteps. |
| limit.start.pos | Axis | Yes | 6.19+ | Start up position of the axis. |
| limit.swapinputs | Axis | Yes | 6.06+ | Reverses the limit positions by swapping the home and away sensors. |
| maxspeed | Axis | Yes | 6.06+ | The maximum speed the device moves at. |
| motion.accelonly | Axis | Yes | 6.06+ | Sets the acceleration used to increase the speed. |
| motion.decelonly | Axis | Yes | 6.06+ | Sets the deceleration used when decreasing the speed. |
| motion.index.dist | Axis | Yes | 6.21+ | The distance between consecutive index positions. |
| motion.index.num | Axis | No | 6.22+ | The current index number. |
| peripheralid | Axis | Yes | 6.06+ | The ID of the connected peripheral. |
| peripheral.serial | Axis | Yes | 6.24+ | The serial number of the attached peripheral. |
| pos | Axis | Yes | 6.06+ | The current absolute position of the device. |
| resolution | Axis | Yes | 6.06+ | Microstep resolution |
| stream.numbufs | Device | No | 6.14+ | The number of stream buffers provided in the device. |
| stream.numstreams | Device | No | 6.14+ | The number of streams provided in the device. |
| system.access | Device | Yes | 6.06+ | Sets the access level of the user. |
| system.axiscount | Device | No | 6.06+ | The number of axes in the device. |
| system.led.enable | Device | Yes | 6.06+ | Enables the front panel LEDs. |
| system.serial | Device | No | 6.15+ | The serial number of the device. |
| system.temperature | Device | No | 6.06+ | The current temperature of the unit, in degrees Celsius. |
| system.voltage | Device | No | 6.06+ | The voltage being applied to the device. |
| version | Device | No | 6.06+ | The firmware version of the device. |
| version.build | Device | No | 6.17+ | The build number of the device’s firmware. |
Binary Protocol
The following table offers a quick command reference for the A-MCA. For convenience, you may sort the table below by instruction name, command number, or reply number. Follow the links to view a detailed description of each instruction or refer to the Binary Protocol Manual.
| Instruction Name | Command# | Command Data | Command Type | Reply Data |
|---|---|---|---|---|
| Reset | 0 | Ignored | Command | None |
| Home | 1 | Ignored | Command | Final position (in this case 0) |
| Renumber* | 2 | Ignored | Command | Device ID |
| Read Register | 5 | Register Address | Command | Data |
| Set Active Register | 6 | Register Address | Setting | Register Address |
| Write Register | 7 | Data | Command | Data |
| Move Tracking | 8 | n/a | Reply | Tracking Position |
| Limit Active | 9 | n/a | Reply | Final Position |
| Manual Move Tracking | 10 | n/a | Reply | Tracking Position |
| Manual Move | 11 | n/a | Reply | Final Position |
| Slip Tracking | 12 | n/a | Reply | Tracking Position |
| Unexpected Position | 13 | n/a | Reply | Final Position |
| Store Current Position* | 16 | Address | Command | Address |
| Return Stored Position | 17 | Address | Command | Stored Position |
| Move To Stored Position | 18 | Address | Command | Final Position |
| Move Absolute | 20 | Absolute Position | Command | Final Position |
| Move Relative | 21 | Relative Position | Command | Final Position |
| Move At Constant Speed | 22 | Speed | Command | Speed |
| Stop | 23 | Ignored | Command | Final Position |
| Restore Settings* | 36 | Peripheral ID | Command | Peripheral ID |
| Set Microstep Resolution* | 37 | Microsteps | Setting | Microsteps |
| Set Running Current* | 38 | Value | Setting | Value |
| Set Hold Current* | 39 | Value | Setting | Value |
| Set Device Mode* | 40 | Mode | Setting | Mode |
| Set Home Speed* | 41 | Speed | Setting | Speed |
| Set Target Speed* | 42 | Speed | Setting | Speed |
| Set Acceleration* | 43 | Acceleration | Setting | Acceleration |
| Set Maximum Position* | 44 | Range | Setting | Range |
| Set Current Position | 45 | New Position | Setting | New Position |
| Set Home Offset* | 47 | Offset | Setting | Offset |
| Set Alias Number* | 48 | Alias Number | Setting | Alias Number |
| Return Device ID | 50 | Ignored | Read-Only Setting | Device ID |
| Return Firmware Version | 51 | Ignored | Read-Only Setting | Version |
| Return Power Supply Voltage | 52 | Ignored | Read-Only Setting | Voltage |
| Return Setting | 53 | Setting Number | Command | Setting Value |
| Return Status | 54 | Ignored | Read-Only Setting | Status |
| Echo Data | 55 | Data | Command | Data |
| Return Firmware Build | 56 | Ignored | Read-Only Setting | Build Number |
| Return Current Position | 60 | Ignored | Read-Only Setting | Position |
| Return Serial Number | 63 | Ignored | Read-Only Setting | Serial Number |
| Set Park State* | 65 | Park State | Setting | Position |
| Set Peripheral ID* | 66 | Peripheral ID | Setting | Peripheral ID |
| Return Digital Input Count | 67 | Ignored | Read-Only Setting | Pin Count |
| Return Digital Output Count | 70 | Ignored | Read-Only Setting | Pin Count |
| Return Analog Input Count | 75 | Ignored | Read-Only Setting | Pin Count |
| Return Analog Output Count | 77 | Ignored | Read-Only Setting | Pin Count |
| Move Index | 78 | Index Number | Command | Final Position |
| Set Index Distance | 79 | Distance | Setting | Distance |
| Set Cycle Distance | 80 | Distance | Setting | Distance |
| Return Encoder Count | 82 | Ignored | Read-Only Setting | Encoder Count |
| Return Calibrated Encoder Count | 83 | Ignored | Read-Only Setting | Calibrated Encoder Count |
| Return Calibration Type | 84 | Ignored | Read-Only Setting | Calibration Type |
| Return Calibration Error | 85 | Ignored | Read-Only Setting | Calibration Error |
| Set Peripheral Serial Number* | 86 | Peripheral Serial Number | Setting | Peripheral Serial Number |
| Set Auto-Reply Disabled Mode* | 101 | Auto-Reply Mode | Setting | Auto-Reply Mode |
| Set Message ID Mode* | 102 | Message ID Mode | Setting | Message ID Mode |
| Set Home Status | 103 | Home Status | Setting | Home Status |
| Set Home Sensor Type* | 104 | Home Sensor Type | Setting | Home Sensor Type |
| Set Auto-Home Disabled Mode* | 105 | Auto-Home Disabled Mode | Setting | Auto-Home Disabled Mode |
| Set Minimum Position* | 106 | Minimum Position | Setting | Minimum Position |
| Set Knob Disabled Mode* | 107 | Knob Disabled Mode | Setting | Knob Disabled Mode |
| Set Knob Direction* | 108 | Direction | Setting | Direction |
| Set Knob Movement Mode* | 109 | Movement Mode | Setting | Movement Mode |
| Set Knob Jog Size* | 110 | Jog Size | Setting | Jog Size |
| Set Knob Velocity Scale* | 111 | Velocity Scale | Setting | Velocity Scale |
| Set Knob Velocity Profile* | 112 | Velocity Profile | Setting | Velocity Profile |
| Set Acceleration Only* | 113 | Acceleration | Setting | Acceleration |
| Set Deceleration Only* | 114 | Deceleration | Setting | Deceleration |
| Set Move Tracking Mode* | 115 | Tracking Mode | Setting | Tracking Mode |
| Set Manual Move Tracking Disabled Mode* | 116 | Tracking Mode | Setting | Tracking Mode |
| Set Move Tracking Period* | 117 | Tracking Period | Setting | Tracking Period |
| Set Closed-Loop Mode* | 118 | Closed-Loop Mode | Setting | Closed-Loop Mode |
| Set Slip Tracking Period* | 119 | Tracking Period | Setting | Tracking Period |
| Set Stall Timeout* | 120 | Timeout | Setting | Timeout |
| Set Device Direction* | 121 | Direction | Setting | Direction |
| Set Baud Rate* | 122 | Baud Rate | Setting | Baud Rate |
| Set Protocol* | 123 | Protocol | Setting | Protocol |
| Convert To Ascii* | 124 | Baud Rate | Command | Baud Rate |
| Error | 255 | n/a | Reply | Error Code |
* The settings for these commands are saved in non-volatile memory, i.e. the setting persists even if the device is powered down. To restore all settings to factory default, use command 36.
Troubleshooting A-Series Closed-Loop Motion Devices
The following sections contain tips for troubleshooting common problems with the A-Series devices.
If the device is unable to communicate, and it is operating erratically, a manual factory reset can be performed as a last resort through the following steps:
- Power Off the device
- Push and hold the knob for the first Axis (if applicable)
- Power On the device
- Continue to hold the knob in until the Blue LED is lit (~5 seconds), release the knob.
The device has been returned to its factory defaults and can be configured per the steps in Initial Setup.
Front Panel Indicators
- Green LED On
- The device is powered on and operating normally
- Green LED Fades In and Out
- The device is parked.
- Issue a tools parking (T:65) unpark command, or home (T:1) the device.
- Green LED Flashes Slowly
- The operating conditions of the device are outside of the recommended range.
- This will occur when the supply voltage is either over or under the recommended range, the internal temperature has exceeded the set limit or the driver has disabled. Check the following:
- The input voltage within the operational range of the device. This can be read from the device with the get system.voltage command.
- The device temperature is within range. This can be read from the device with the get system.temperature command.
- The driver is not disabled. If the driver is disabled the result of the warnings command will contain the FD flag.
- Green LED Off
- The device is not powered.
- Check the supply connections and power adaptor for correct operation.
- Red LED On or Flashing.
- A critical error has occurred.
- Please contact Zaber Technical Support.
- Blue LED On or Flashing.
- The device has slipped or stalled.
- Please see the Slipping and Stalling section below.
- Yellow LED Always Off or Flashes but No Reply.
- There are communication errors.
- Please see the Communication Errors section below.
Manual Control
- Turning the knob either way results in no movement
- The knob may have been disabled.
- Check that the knob.enable (T:107) setting is correct.
- Restore the default parameters through the system restore (T:36) command.
- The device won't cover the full range of travel.
- The device hasn't been homed.
- Turn the knob anti-clockwise until the device reaches the fully retracted position (closest to the motor). The device will home and the full range of travel available.
Unexpected Behaviour
- The device doesn't respond to a move command.
- The device needs to be homed before use.
- Send the home (T:1) command.
- The device is moving on its own and running against the ends of travel.
- The position encoder has de-synchronized.
- Reset the device by power cycling it or sending system reset (T:0) command, then re-initialize it with the home (T:1) command. Ground the device and avoid operation under a statically noisy environment.
- The device is moving very slowly. It used to move faster.
- The speed settings may have been changed inadvertently.
- Send a system restore (T:36) command.
- The device makes louder than normal noise during travel and is frequently slipping.
- This condition happens if the thrust needed is more than the thrust available from the device.
- Check the following:
- The force on the device is less than the maximum thrust.
- The voltage using the get system.voltage command. Voltage less than the specified voltage for the device will reduce the device’s maximum thrust.
- Test the following:
- Try a slower target velocity. Stepper motors produce more thrust when moving slowly.
- Try a lower acceleration and deceleration.
- Clean the screw and lightly re-grease it with a grease that does not degrade plastics.
- The device has repeatability errors smaller than 4 full steps.
- If steps aren't being skipped, friction or loose parts may still cause some variation when returning to a position.
- Please contact Zaber Technical Support.
- The device doesn't cover the full range of travel, or runs into the end.
- A setting might have been inadvertently changed.
- home (T:1) the device to see if this corrects the behaviour.
- Send a system restore (T:36) command. Ensure that the periid setting of the devices corresponds to the attached device. A list of peripheral ids are available at the Peripheral Ids page.
Communication Errors
- There is no communication with the device, the Yellow LED does not come on or flash.
- There are several things should be checked:
- Make sure the correct serial port is selected. Try selecting other serial ports in the software.
- Check the baud rate, hand shaking, parity, stop bit, etc. when configuring the serial communications software. The required settings are listed in the RS232 Communications section above.
- Make sure there are no bent pins in the ends of all the data cables
- Make sure the device is powered, the Green LED should be on.
- If the computer is a laptop running on batteries, try plugging in the power. Some laptops disable the serial ports when running on batteries.
- Make sure a null modem adaptor or cable is not being used.
- Make sure the correct adaptors(if any) are being used. Refer to the pinouts in the RS232 Communications section above.
- If the problem encountered when trying to control the device with custom software, try using one of the demo programs from the Zaber website to verify that the hardware is functioning properly.
- The yellow light comes on briefly when sending a command, but the device does not move and does not reply.
- Check baud rate, hand shaking, parity, stop bit, etc. are set as per the RS232 Communications defaults.
- The device numbers may not be what is expected, issue a system renumber (T:2) command. Make sure that the computer does not transmit anything else while the devices renumber.
- If using the binary protocol, check the following:
- 6 bytes are transmitted and that the device number and command are valid.
- The software does not transmit any control characters such as line feed and spaces.
- That the serial port is not configured with a termination character (it often defaults to linefeed).
- If problems are encountered when using custom software, try using one of the demo programs from the Zaber website to verify that the hardware works.
- The device does not behave as expected when software sends it a series of commands.
- The computer might be set to Unicode. This is common for languages that use non-Latin based characters. Go to Control Panel/Regional and Language Options/Advanced. Select a language for non-unicode programs. This should be English or another Latin based character language.
- Check what is being sent out of the serial port. stackoverflow.com has a list of some tools to monitor serial ports.
- In Binary mode, the device does not send replies but otherwise works.
- Auto-reply might have been disabled via T:101.
- Send a system restore (T:36) command.
- If the problem is encountered when trying to control the device with custom software:
- Use a demo program from the Zaber website to verify that the hardware is functioning properly.
- Make sure that the receiving part of the code or commercial package is correct.
- Check the serial port settings are correct.
- Check connectors for bent or broken pins.
- In Binary mode, the device sometimes returns fewer than 6 bytes.
- This typically indicates a problem with the serial port settings. Some serial ports are set to automatically recognize and remove specific control characters such as carriage returns when they appear in the RS232 receive buffer.
- Check the settings are correct and not removing or replacing characters.
Slipping and Stalling
- The device moves smoothly, but only moves for a short time then stops. The blue LED is flashing but the device is not actually slipping or stalling
- The internal encoder counter needs to be re-initialized. Reset the device by power cycling it or sending system reset (T:0) command, then re-initialize it with the home (T:1) command.
- Ground the device and avoid operating it under statically noisy environment.
- The device makes noise but does not move. Blue LED is flashing.
- The device is stalling.
- Try removing all external loads. If the device now extends and retracts normally, the problem is excessive load. Try to reduce the load and ensure the load is less than the maximum thrust. A higher thrust or torque can be achieved by lowering the speed of the device using the maxspeed (T:42) setting.
- If a device is stalling with no external load at default speed and acceleration settings then it requires servicing.
Warranty and Repair
For Zaber's policies on warranty and repair, please refer to the Ordering Policies.
Standard products
Standard products are any part numbers that do not contain the suffix ENG followed by a 4 digit number. Most, but not all, standard products are listed for sale on our website. All standard Zaber products are backed by a one-month satisfaction guarantee. If you are not satisfied with your purchase, we will refund your payment minus any shipping charges. Goods must be in brand new saleable condition with no marks. Zaber products are guaranteed for one year. During this period Zaber will repair any products with faults due to manufacturing defects, free of charge.
Custom products
Custom products are any part numbers containing the suffix ENG followed by a 4 digit number. Each of these products has been designed for a custom application for a particular customer. Custom products are guaranteed for one year, unless explicitly stated otherwise. During this period Zaber will repair any products with faults due to manufacturing defects, free of charge.
How to return products
Customers with devices in need of return or repair should contact Zaber to obtain an RMA form which must be filled out and sent back to us to receive an RMA number. The RMA form contains instructions for packing and returning the device. The specified RMA number must be included on the shipment to ensure timely processing.
Email Updates
If you would like to receive our periodic email newsletter including product updates and promotions.
Contact Information
Contact Zaber Technologies Inc by any of the following methods:
| Phone | 1-604-569-3780 (direct) 1-888-276-8033 (toll free in North America) |
|---|---|
| Fax | 1-604-648-8033 |
| #2 - 605 West Kent Ave. N., Vancouver, British Columbia, Canada, V6P 6T7 | |
| Web | www.zaber.com |
| Please visit our website for up to date email contact information. |
The original instructions for this product are available at https://www.zaber.com/manuals/A-MCA.
Appendix A - Available Communications Ports
The following instructions outline how to find installed serial ports on your computer.
Windows
- Open Search or Run from the Start Menu or Taskbar, type "Device Manager" and press enter.
- Expand the Ports (COM & LPT) category.
- In this example there are two serial ports available (COM1 and COM15), which are both USB adaptors.


Linux
- Finding devices
- Open a terminal and execute the following command:
- dmesg | grep -E ttyU\?S↵
- The response will be similar to the following:
[ 2.029214] serial8250: ttyS0 at I/O 0x3f8 (irq = 4) is a 16550A
[ 2.432572] 00:07: ttyS0 at I/O 0x3f8 (irq = 4) is a 16550A
[ 2.468149] 0000:00:03.3: ttyS4 at I/O 0xec98 (irq = 17) is a 16550A
[ 13.514432] usb 7-2: FTDI USB Serial Device converter now attached to ttyUSB0 - This shows that there are 3 serial ports available: ttyS0, ttyS4 and ttyUSB0 (a USB adaptor)
- Checking port permissions
- Using the ports found above, execute the following command
- ls -l /dev/tty{S0, S4, USB0}↵
- The permissions, given below, show that a user has to be root or a member of the dialout group to be able to access these devices
crw-rw---- 1 root dialout 4, 64 Oct 31 06:44 /dev/ttyS0
crw-rw---- 1 root dialout 4, 68 Oct 31 06:45 /dev/ttyS4
crw-rw---- 1 root dialout 188, 0 Oct 31 07:58 /dev/ttyUSB0
- Checking group membership
- groups↵
- The output will be similar to the following:
adm cdrom sudo dip plugdev users lpadmin sambashare
Notice that dialout is not in the list - A user can be added to the dialout group with the following command
- sudo adduser $USER dialout↵
- Group membership will not take effect until the next logon.
OSX
- Finding devices
- Open a terminal and execute the following command:
- ls /dev/cu.*serial*
- The response will be similar to the following:
/dev/cu.usbserial-FTB3QAET
/dev/cu.usbserial-FTEJJ1YW - This shows that there are two serial ports available, both of which happen to be USB adaptors.
- There may be other devices that match this query, such as keyboards or some web cameras. To determine which one corresponds to your USB serial cable, try repeating the command with and without the cable connected to the computer, to see which one appears and disappears.