Daisy-chaining Data and Power to Reduce Cabling
Last updated on May 05, 2022
Introduction
Setting up motion control systems can be time consuming, costly, and complex. At Zaber, we focus on simplifying motion control. One way our systems can save you time and money is by reducing the number of cables required for a multi-axis system. While there are a few ways to reduce cabling, in this case we will be discussing daisy-chaining both data and power for multiple Zaber devices.
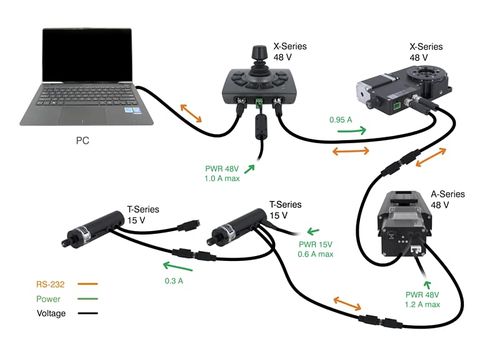
Daisy-chaining refers to the connection of several devices in a linear series, as shown in Figure 1. Zaber's stepper motor controllers can share both data and power through a daisy-chain, which is the most efficient way to reduce cabling.

Overview of Zaber Products
Considerations to keep in mind when daisy-chaining data and power will be discussed in detail, but first — in order to specify the individual daisy-chaining capabilities of Zaber devices — we will describe how daisy-chaining works within each series that we currently offer. Each series is identified by the first letter of a device's name: Zaber T-Series, A-Series, and X-Series. Each series shares some common features, including connectors, communication, protocols, and power. For example, a T-LA60A actuator belongs to the T-Series, an A-LST1500A stage belongs to the A-Series, and an X-LRM050A linear stage belongs to the X-Series. Further details regarding each series will be discussed in later sections.
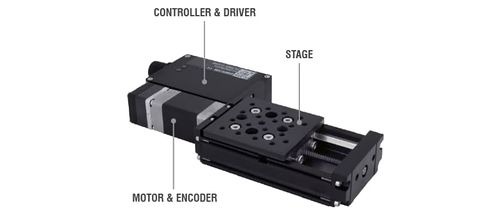
When we use the term device, we mean either a stand-alone controller or a positioner with a built-in controller and driver. An example, of a Zaber device is illustrated in Figure 2. Stand-alone controllers are designed for use with Zaber's peripherals, which are positioners without a built-in controller, but these controllers can also be used with third-party, 2-phase stepper motors.
Daisy-Chaining Data
In order to send and receive messages from the same serial port on a computer, all of the devices in the daisy-chain need to be set to the same protocol and baud rate. There are two protocols: Zaber ASCII and Zaber Binary. A detailed description and comparison of both can be found in our short technical article: Simplifying Controls Protocols.
All Zaber devices use RS-232 serial communication, and all can communicate in the Zaber Binary protocol at a baud rate of 9600 bits per second. While T-Series devices are limited to these settings, the A-Series and X-Series have additional communication options, as shown in Figure 3. More information about each series can be found in the Series Reference Table.
Baud rate is a speed measurement for communication. It specifies the number of bits per second that are transferred over the serial port. For example, a baud rate of 9600 baud is 9600 bits per second. This means that the serial port is sampling each data line at 9600 Hz. As you can see, A- and X-Series devices have a slight advantage over T-Series devices because they can communicate at higher speeds.
| T-Series | A-Series | X-Series | |
|---|---|---|---|
| Default Protocol | Binary | Binary | ASCII |
| Default Baud Rate | 9600 | 9600 | 115200 |
| Available Protocols | Binary | Binary & ASCII | Binary & ASCII |
| Available Baud Rates | 9600 | 9600, 19200, 38400, 57600, 115200 | 9600, 19200, 38400, 57600, 115200 |
Figure 3: Default and available protocols and baud rates.
Daisy-Chaining Power
The table in Figure 4 shows the voltage ranges required to power a device within each series, as well as whether they can daisy-chain power. Each series is unique in terms of daisy-chaining power, and in every case the voltage and current output of a power supply can affect the performance of the connected device.
| T-Series | A-Series | X-Series | |
|---|---|---|---|
| Power Supply | 12 - 16 VDC | 24 - 48 VDC | 24 - 48 VDC |
| Daisy-chain Power | Yes, only with T-Series devices | No | Yes, only with X-Series devices |
Figure 4: Voltage ratings for different series.
Considerations for powering daisy-chained devices include:
- Can the devices daisy-chain power?
- What is the recommended voltage for each device?
- What is the maximum current draw?
- A power supply must be rated for at least the maximum total current draw of the devices connected to it.
- What is the motor rated current?
- Which series are daisy-chained together?
- In what order should they be connected if there is more than one series in a daisy-chain?
The recommended voltage and maximum current draw for a device, or in the case of peripherals, the motor rated current and recommended voltage for a stand-alone controller, can be found online in the 'Series Specs' section of each device or peripheral.
Daisy-chaining for Specific Series
T-Series:
T-Series devices use L/R drivers, for which power supply voltage should match the motor's rated voltage. Most T-Series motors have a voltage rating of about 12 VDC, and the power supplies have a narrow voltage range of 12 - 16 VDC. Zaber offers power supplies with 15 VDC for all T-Series devices because these devices have better performance when powered at 15 VDC compared to 12 VDC. This allows you to daisy-chain T-Series devices and share power without worrying about different voltage levels. The only consideration remaining is the sum of the maximum current draw of each device in a chain, which will determine whether the power supply selected is suitable. For example, the maximum current required would determine whether the devices need a power supply with higher amperage, or if additional power supplies are needed. Figure 5 shows an example of a T-Series daisy-chain, which is able to use only one power supply and one computer connection because data and power are shared through the daisy-chain.

A-Series:
While A-Series devices can daisy-chain data, such that a series of connected devices require just a single connection to the computer, they are not capable of sharing power in a daisy-chain. Therefore, a power supply must be connected to each A-Series device. Similar to the X-Series, A-Series devices have the option to be powered with 24 - 48 VDC, which we will discuss in a later section.
X-Series:
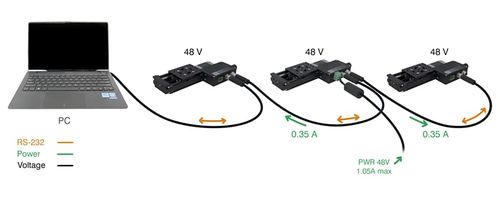
Similar to the T-Series, X-Series devices can daisy-chain power with other X-Series devices. In addition to considering the maximum current draw of X-Series devices in a daisy-chain, you must also consider what voltage level will result in the best performance and whether better performance is attained by separating daisy-chains.
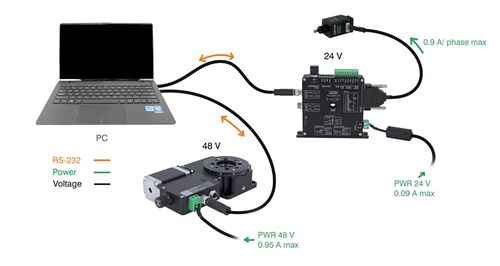
To illustrate this, Figure 6 shows a daisy-chain of devices that all require the same voltage level, while Figure 7 shows one possible solution when two devices each require a different voltage level.
Voltage for A-Series and X-Series:
A-Series and X-Series devices use chopper drives. Unlike the L/R driver used in the T-Series, chopper drives don't need to match the voltages of the motor and the power supply. This allows them to use a low voltage motor (3 - 6 VDC) with a higher voltage power supply, which results in higher speed capacity than T-Series devices. However, there can be a noticeable difference in performance when powering A- and X-Series devices with either 24 VDC or 48 VDC. The 'Series Specs' section on each product's web page lists the recommended power supply voltage and often has performance charts for both 24 VDC and 48 VDC. Below are examples of the performance of a smaller motor, NEMA 8 (Figure 8), and a larger motor, NEMA 17 (Figure 9), each powered with 24 VDC and 48 VDC.
Note that NEMA stands for "National Electrical Manufacturers Association", which is an association that creates standards developed by manufacturers to provide descriptions of how things should be made and named. NEMA labels stepper motors in relation to the size of the motor's faceplate in tenths of inches. For example, NEMA 8 has a 0.8 in. x 0.8 in. faceplate. Standardizing stepper motors ensures that motors from different manufacturers will fit the same mounting and makes changing components easier.
For devices that use smaller motors, such as NEMA 8 motors, we recommend using 24 VDC for best performance. This is because smaller motors typically have a higher maximum speed than larger motors. In addition, Zaber controllers have a maximum speed capacity of about 3000 RPM, which is less than the maximum speed for smaller motors. Although smaller motors won't reach their maximum speed, a power supply of 24 VDC will result in higher torque and similar maximum speed compared to a 48 VDC supply. Therefore, most devices and peripherals with smaller stepper motors perform better with a 24 VDC supply when using a Zaber device. This is illustrated in the performance chart in Figure 8. For most devices with larger motors, using a 48 VDC power supply gives the best performance. Their maximum speed is typically close to or less than 3000 RPM, and the higher voltage is required to reach those speeds. This is illustrated in the performance chart in Figure 9.
T-Series, A-Series, and X-Series combined:
When daisy-chaining devices from different series, all the considerations listed previously contribute to the order in which the devices should be daisy-chained for best performance. When combining different Zaber series, we recommend X-Series devices be connected at the beginning of a daisy-chain (closest to the computer), but it is possible to connect the X-Series devices further down the chain if necessary. Figure 10 illustrates a multi-axis system that uses devices from all three series.
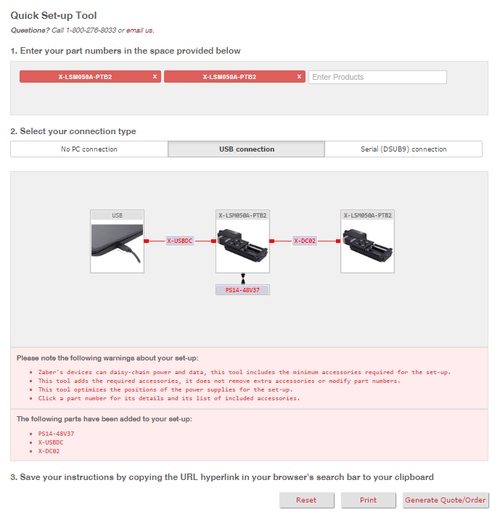
To narrow down the necessary accessories and power supplies, we recommend using our Quick Set-up Tool. This tool helps to configure devices that will be connected in series. The Quick Set-up Tool will also recommend the necessary accessories if they're not already included in the part numbers. Figure 11 shows an example of a 2-axis configuration on the Quick Set-Up Tool. In Section 1, a 2-axis system using two X-LSM050A stages are entered without accessory kits. As you can see, the Quick Set-up Tool suggests including a power supply and data cables, and it lists the part numbers that it added to the setup in Section 2.
Discussion/Conclusion
Daisy-chaining Zaber devices reduces the number of accessories required for a series of devices, saving time and money. As discussed in this article, there are considerations about the interaction of specific devices with one another, and by following our guidelines, you can make a more efficient workflow of Zaber devices that results in fewer power supplies, better serial communication, and a cleaner workspace.
If you find you need help deciding which accessories are suitable and which ones are required, please contact our support team.